If you found these codes useful buy me a beer
Friday, June 12, 2020
Thursday, June 23, 2011
The Euclidean Distance/Vector Angle Edge Detector (DRAFT)
This Edge detector makes use of color information to detect edges. Where most edge detectors use only intensity, this edge detector also considers hue and saturation.
Algorithm for Euclidean Distance/Vector Angle Edge Detector:
We use a vector Gradient edge detector which is a 3×3 mask. Find E_vg the euclidean distance operator
R = double(I1(:,:,1));
G = double(I1(:,:,2));
B = double(I1(:,:,3));
I_size = size(I1(:,:,1)); E_vg = zeros(I_size(1),I_size(2));
for y=2:(I_size(1)-1),
for x=2:(I_size(2)-1),
for i=-1:1,
for j=-1:1,
ED = sqrt((R(y+i,x+j)-R(y,x))^2 + (G(y+i,x+j)-G(y,x))^2 + (B(y+i,x+j)-B(y,x))^2);
if ED > E_vg(y,x)
E_vg(y,x) = ED;
end
end
end
end
end Run the resulting E_vg through a threshold
ED_thresh = 45.0; //Change for Testing upto 255
ED_edges = zeros(I_size(1),I_size(2));
for y=1:I_size(1),
for x=1:I_size(2),
if E_vg(y,x) > ED_thresh
ED_edges(y,x) = 255;
end
end
end



Algorithm for Euclidean Distance/Vector Angle Edge Detector:
- For each pixel in the image, take the 3×3 window of pixels around it.
- Calculate the saturation-based combination of the Euclidean distance and Vector Angle between the center pixel and each pixel on the ring of the 3×3 window.
- Assign the largest value obtained to the center pixel.
- Apply a threshold to the image to eliminate false edges
We use a vector Gradient edge detector which is a 3×3 mask. Find E_vg the euclidean distance operator
R = double(I1(:,:,1));
G = double(I1(:,:,2));
B = double(I1(:,:,3));
I_size = size(I1(:,:,1)); E_vg = zeros(I_size(1),I_size(2));
for y=2:(I_size(1)-1),
for x=2:(I_size(2)-1),
for i=-1:1,
for j=-1:1,
ED = sqrt((R(y+i,x+j)-R(y,x))^2 + (G(y+i,x+j)-G(y,x))^2 + (B(y+i,x+j)-B(y,x))^2);
if ED > E_vg(y,x)
E_vg(y,x) = ED;
end
end
end
end
end Run the resulting E_vg through a threshold
ED_thresh = 45.0; //Change for Testing upto 255
ED_edges = zeros(I_size(1),I_size(2));
for y=1:I_size(1),
for x=1:I_size(2),
if E_vg(y,x) > ED_thresh
ED_edges(y,x) = 255;
end
end
end

Threshold of 45

Threshold of 80

Threshold 200
Wednesday, December 22, 2010
Region Of Interest using Optical Flow
Shaking VS Stable
Tracking using Lucas Kanade Optical Flow
the ROI (region of interest) is selected manually by the user
GroundTruth Tracking

ntxy Ground truth

ive used the following code to create a manual tracking using mouse clicks
the following is the code used:
%Ground truth tracking
picnum = 60;
fig = figure;
hold on;
points = cell(1,1);
buttons =1;
while (buttons < 4) %track 3 objects only
tframe=1;
for tframe = 1:picnum
filename1 = sprintf('./video/%d.pgm', tframe);
title('Click the top left corner of an object to track...');
[x1 y1 button] = ginput(1);
points{buttons,tframe} = [x1 y1];
if (button~= 2)
plot(x1, y1, 'rx');
figure(fig)
cla;
imshow(filename1);hold on;
%comment out to remove the need for unwanted empty points in
%the cell
% else
% break;
end
end
buttons=buttons+1;
end
hold off
imshow(sprintf('./video/%d.pgm', 1));hold on;
x=[0 0];y=[0 0];
for i=1:picnum-1
x = [points{1,i}(1) points{1,i+1}(1) x];
y = [points{1,i}(2) points{1,i+1}(2) y];
end
plot(x,y,'y','LineWidth',2);
clear x y;
x=[0 0];y=[0 0];
for i=1:picnum-1
x = [points{2,i}(1) points{2,i+1}(1) x];
y = [points{2,i}(2) points{2,i+1}(2) y];
end
plot(x,y,'r','LineWidth',2);
clear x y;
x=[0 0];y=[0 0];
for i=1:picnum-1
x = [points{3,i}(1) points{3,i+1}(1) x];
y = [points{3,i}(2) points{3,i+1}(2) y];
end
plot(x,y,'b','LineWidth',2);
hold off
Wednesday, November 3, 2010
Face Detection trials
Detecting head: while sift shows its robustness in scale and rotation, there is somewhat of an illumination problem
Clearer YOUTUBE videos
http://www.youtube.com/watch?v=mgr96oeXqH0
http://www.youtube.com/watch?v=lapux3e91_Y
http://www.youtube.com/watch?v=bMBNLPcLOVk
Matlab AVI video use
Matlab requires a RAW VIDEO file to be imported and used. however most cameras and recording devices use a compression to reduce file size and so on.
my trouble was an AVI file with a different codec. when i used AVIREAD in matlab, it gave me an error that it wasnt able to find the codedc or the frames are not known.
one option that is FREE:
use FFMPEG im downloading the executable for windows from this URL
ffmpeg is a command line tool, so in order to convert to a raw video to use in maatlab you use this command:
foo.avi is your compressed video file
bar.avi is your new raw video file name that you will use in MATLAB
my trouble was an AVI file with a different codec. when i used AVIREAD in matlab, it gave me an error that it wasnt able to find the codedc or the frames are not known.
one option that is FREE:
use FFMPEG im downloading the executable for windows from this URL
ffmpeg is a command line tool, so in order to convert to a raw video to use in maatlab you use this command:
c:/> ffmpeg -i foo.avi -vcodec rawvideo bar.avi
foo.avi is your compressed video file
bar.avi is your new raw video file name that you will use in MATLAB
Wednesday, October 27, 2010
SIFT keypoint matching Trials of my Implementation
{kind=link}

 for my second experiment i tried translation invariance, 2 images taken from different angles. i got 243 matches
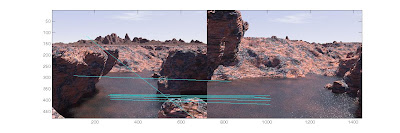
for my second experiment i tried translation invariance, 2 images taken from different angles. i got 243 matches In my next experiment i tried a complete affine transformation of a graffiti wall, i got 22 matches but not so accurate. this shows the keypoints have a problem in its rotation and scaling invariants. my magnitude and teta maybe the cause of this.
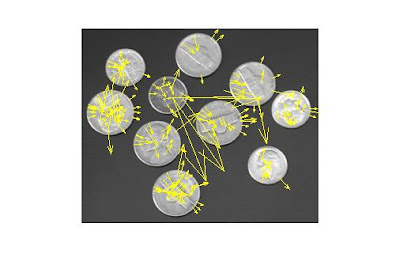
In my next experiment i tried a complete affine transformation of a graffiti wall, i got 22 matches but not so accurate. this shows the keypoints have a problem in its rotation and scaling invariants. my magnitude and teta maybe the cause of this. This is a matching from David Lowes algorithm showing a clear affine invariance.
This is a matching from David Lowes algorithm showing a clear affine invariance.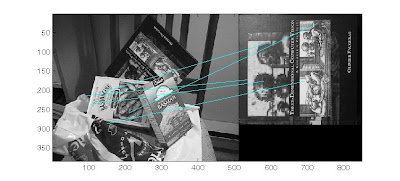
my implementation gives me a very bad matching. alot more work to do.
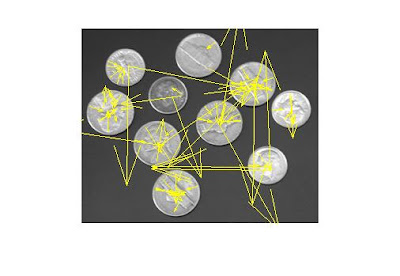
and more bad results, if the orientation of the keypoint is wrong, the matching will also suffer so i tired different tangents in matlab
atan(dy/dx);
 atan2(dy,dx);
atan2(dy,dx);BOTH IMAGES: show clearly that rotation invariance is not achieved, this is the reason why the matching gives alot of false negative results
furthermore; the amount of BLUR is also very important
 images and details from (based on my understanding):
images and details from (based on my understanding):Lowe, David G. “Distinctive Image Features from Scale Invariant Keypoints”. International Journal of Computer Vision, 60, 2 (2004)
Subscribe to:
Posts (Atom)