Wednesday, December 22, 2010
Region Of Interest using Optical Flow
Shaking VS Stable
Tracking using Lucas Kanade Optical Flow
the ROI (region of interest) is selected manually by the user
GroundTruth Tracking

ntxy Ground truth

ive used the following code to create a manual tracking using mouse clicks
the following is the code used:
%Ground truth tracking
picnum = 60;
fig = figure;
hold on;
points = cell(1,1);
buttons =1;
while (buttons < 4) %track 3 objects only
tframe=1;
for tframe = 1:picnum
filename1 = sprintf('./video/%d.pgm', tframe);
title('Click the top left corner of an object to track...');
[x1 y1 button] = ginput(1);
points{buttons,tframe} = [x1 y1];
if (button~= 2)
plot(x1, y1, 'rx');
figure(fig)
cla;
imshow(filename1);hold on;
%comment out to remove the need for unwanted empty points in
%the cell
% else
% break;
end
end
buttons=buttons+1;
end
hold off
imshow(sprintf('./video/%d.pgm', 1));hold on;
x=[0 0];y=[0 0];
for i=1:picnum-1
x = [points{1,i}(1) points{1,i+1}(1) x];
y = [points{1,i}(2) points{1,i+1}(2) y];
end
plot(x,y,'y','LineWidth',2);
clear x y;
x=[0 0];y=[0 0];
for i=1:picnum-1
x = [points{2,i}(1) points{2,i+1}(1) x];
y = [points{2,i}(2) points{2,i+1}(2) y];
end
plot(x,y,'r','LineWidth',2);
clear x y;
x=[0 0];y=[0 0];
for i=1:picnum-1
x = [points{3,i}(1) points{3,i+1}(1) x];
y = [points{3,i}(2) points{3,i+1}(2) y];
end
plot(x,y,'b','LineWidth',2);
hold off
Wednesday, November 3, 2010
Face Detection trials
Detecting head: while sift shows its robustness in scale and rotation, there is somewhat of an illumination problem
Clearer YOUTUBE videos
http://www.youtube.com/watch?v=mgr96oeXqH0
http://www.youtube.com/watch?v=lapux3e91_Y
http://www.youtube.com/watch?v=bMBNLPcLOVk
Matlab AVI video use
Matlab requires a RAW VIDEO file to be imported and used. however most cameras and recording devices use a compression to reduce file size and so on.
my trouble was an AVI file with a different codec. when i used AVIREAD in matlab, it gave me an error that it wasnt able to find the codedc or the frames are not known.
one option that is FREE:
use FFMPEG im downloading the executable for windows from this URL
ffmpeg is a command line tool, so in order to convert to a raw video to use in maatlab you use this command:
foo.avi is your compressed video file
bar.avi is your new raw video file name that you will use in MATLAB
my trouble was an AVI file with a different codec. when i used AVIREAD in matlab, it gave me an error that it wasnt able to find the codedc or the frames are not known.
one option that is FREE:
use FFMPEG im downloading the executable for windows from this URL
ffmpeg is a command line tool, so in order to convert to a raw video to use in maatlab you use this command:
c:/> ffmpeg -i foo.avi -vcodec rawvideo bar.avi
foo.avi is your compressed video file
bar.avi is your new raw video file name that you will use in MATLAB
Wednesday, October 27, 2010
SIFT keypoint matching Trials of my Implementation
{kind=link}

 for my second experiment i tried translation invariance, 2 images taken from different angles. i got 243 matches
for my second experiment i tried translation invariance, 2 images taken from different angles. i got 243 matches In my next experiment i tried a complete affine transformation of a graffiti wall, i got 22 matches but not so accurate. this shows the keypoints have a problem in its rotation and scaling invariants. my magnitude and teta maybe the cause of this.
In my next experiment i tried a complete affine transformation of a graffiti wall, i got 22 matches but not so accurate. this shows the keypoints have a problem in its rotation and scaling invariants. my magnitude and teta maybe the cause of this. This is a matching from David Lowes algorithm showing a clear affine invariance.
This is a matching from David Lowes algorithm showing a clear affine invariance.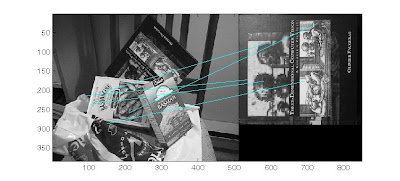
my implementation gives me a very bad matching. alot more work to do.
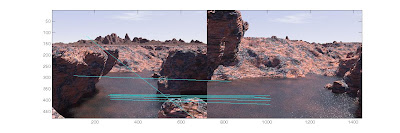
and more bad results, if the orientation of the keypoint is wrong, the matching will also suffer so i tired different tangents in matlab
atan(dy/dx);
 atan2(dy,dx);
atan2(dy,dx);BOTH IMAGES: show clearly that rotation invariance is not achieved, this is the reason why the matching gives alot of false negative results
furthermore; the amount of BLUR is also very important
 images and details from (based on my understanding):
images and details from (based on my understanding):Lowe, David G. “Distinctive Image Features from Scale Invariant Keypoints”. International Journal of Computer Vision, 60, 2 (2004)
Monday, October 25, 2010
My SIFT implementation and comparisons
Im trying to implement SIFT in matlab and compare it with other implementations
the comparisons are against the following:
original SIFT code by LOWE found at this URL
the other is the popular A. Vedaldi Code found at this URL

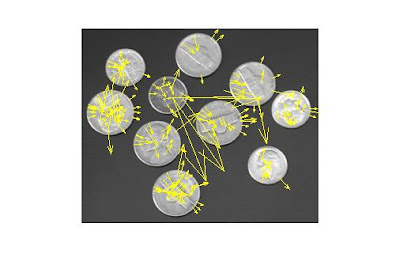
This is the result of the vadaldi code that finds 262 key points

This is the original SIFT code by David Lowe showing 249 keypoints

{kind=link}
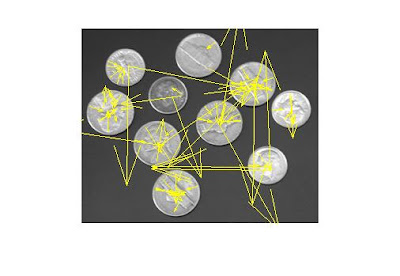
This is from my code showing 315 keypoints.
from all 3 images you can see that there are points that are outside of the image and a surprising 70 extra keypoints on my implementation. obviously my implementation is wrong, so i tried to go through the code and adjusted a few things
 Now i get 195 keypoints and as you can see from the image, all the keypoints are located inside of the image. my next problem is the magnitude.
Now i get 195 keypoints and as you can see from the image, all the keypoints are located inside of the image. my next problem is the magnitude.from the previous images, the code from LOWE and VEDALDI have a very good magnitude however my implementation has very small.



All yellow markers are from my implementation
Thursday, October 21, 2010
Computer vision Datasets to use
a very nice dataset collected by Krystian Mikolajczyk for testing scaled and affine interest point detectors with various types of local image descriptors.
These are some of the other dataset that i use:
MIT Face Dataset
MIT Car Datasets
MIT Street Scenes
Pedestrian dataset from MIT
Most of the files are in *.ppm format, i personally use adobe photoshop to open these
These are some of the other dataset that i use:
MIT Face Dataset
MIT Car Datasets
MIT Street Scenes
Pedestrian dataset from MIT
Most of the files are in *.ppm format, i personally use adobe photoshop to open these
Thursday, September 30, 2010
background subtraction (problems)
there are several problems that must
be addressed by a good background removal algorithm to
correctly detect moving objects. A good background removal
algorithm should handle the relocation of background objects,
non-stationary background objects e.g. waving trees,
and image changes due to camera motion which is common
in outdoor applications e.g. wind load. A background removal
system should adapt to illumination changes whether
gradual changes (time of day) or sudden changes (lightswitch),
whether global or local changes such as shadows and interreflections.
A foreground object might have similar characteristics
as the background, it become difficult to distinguish
between them (camouflage). A foreground object that becomes
motionless can not be distinguished from a background
object that moves and then becomes motionless
(sleeping person). A common problem faced in the background
initialization phase is the existence of foreground
objects in the training period, which occlude the actual background,
and on the other hand often it is impossible to clear
an area to get a clear view of the background, this puts serious
limitations on system to be used in high traffic areas.
Some of these problems can be handled by very computationally
expensive methods, but in many applications, a short
processing time is required.
for a few see the following: POST1 - POST2 - POST3
be addressed by a good background removal algorithm to
correctly detect moving objects. A good background removal
algorithm should handle the relocation of background objects,
non-stationary background objects e.g. waving trees,
and image changes due to camera motion which is common
in outdoor applications e.g. wind load. A background removal
system should adapt to illumination changes whether
gradual changes (time of day) or sudden changes (lightswitch),
whether global or local changes such as shadows and interreflections.
A foreground object might have similar characteristics
as the background, it become difficult to distinguish
between them (camouflage). A foreground object that becomes
motionless can not be distinguished from a background
object that moves and then becomes motionless
(sleeping person). A common problem faced in the background
initialization phase is the existence of foreground
objects in the training period, which occlude the actual background,
and on the other hand often it is impossible to clear
an area to get a clear view of the background, this puts serious
limitations on system to be used in high traffic areas.
Some of these problems can be handled by very computationally
expensive methods, but in many applications, a short
processing time is required.
for a few see the following: POST1 - POST2 - POST3
Image Filtering (Gaussian)
A filter is any kind of processing that has one characteristic: it takes a signal as the input and produces a relevant output signal after processing it in some way. A filter can always be mathematically described.
In Matlab:
n represents the number of cells so for a 2D 3x3 filter n=9 for a 1D filter the number of cells in my example above is 7
% 2D Gaussian Filter
x = -1/2:1/(n-1):1/2;
[Y,X] = meshgrid(x,x);
f = exp( -(X.ˆ2+Y.ˆ2)/(2*sˆ2) );
f = f / sum(f(:));
%1D Gaussian Filter
x = -1/2:1/(n-1):1/2;
f = exp( -(x.^2)/(2*sigma^2) );
g = f / sum(sum(f));
An example of a 1D filter:
1 2 3 4 3 2 1
An example of a 2D filter:
1 1 1 1 1
1 2 2 2 1
1 2 3 2 1
1 2 2 2 1
1 1 1 1 1
In Matlab:
n represents the number of cells so for a 2D 3x3 filter n=9 for a 1D filter the number of cells in my example above is 7
% 2D Gaussian Filter
x = -1/2:1/(n-1):1/2;
[Y,X] = meshgrid(x,x);
f = exp( -(X.ˆ2+Y.ˆ2)/(2*sˆ2) );
f = f / sum(f(:));
%1D Gaussian Filter
x = -1/2:1/(n-1):1/2;
f = exp( -(x.^2)/(2*sigma^2) );
g = f / sum(sum(f));
Monday, September 27, 2010
Object detection Problem
one of the main problems of object tracking is identifying the object to be tracked. from my previous POST, i selected the object manually
Object detection is a necessary step for any tracking algorithm because the algorithm needs to identify the moving object. The objective of object detection is to find out the position of the object and the region it occupies in the first frame.
This task is extremely difficult due to the complex shapes of the moving targets. In order to simplify the problem, a variety of constrains are imposed to help in finding the object in image plane, such as the number of objects to be tracked, types of objects, etc. Currently, there are three popular techniques used in object tracking: image segmentation, background subtraction and supervised learning algorithms.
PROBLEMS
background subtraction is used for fixed cameras for moving camera we can use SIFT to stabilize the camera and perform background subtraction. However we do not get 100% stability with this method.
The image segmentation methods are able to partition the image into perceptually similar regions, but the criteria for a good partition and the efficiency are two problems that the image segmentation algorithms need to address.
The main drawback for supervised learning methods is that they usually require a large collection of samples from each object class and the samples must be manually labeled.
SOURCE : Tracking of Multiple Objects under Partial Occlusion - Bing Han, Christopher Paulson, Taoran Lu, Dapeng Wu, Jian Li - 2010
Object detection is a necessary step for any tracking algorithm because the algorithm needs to identify the moving object. The objective of object detection is to find out the position of the object and the region it occupies in the first frame.
This task is extremely difficult due to the complex shapes of the moving targets. In order to simplify the problem, a variety of constrains are imposed to help in finding the object in image plane, such as the number of objects to be tracked, types of objects, etc. Currently, there are three popular techniques used in object tracking: image segmentation, background subtraction and supervised learning algorithms.
PROBLEMS
background subtraction is used for fixed cameras for moving camera we can use SIFT to stabilize the camera and perform background subtraction. However we do not get 100% stability with this method.
The image segmentation methods are able to partition the image into perceptually similar regions, but the criteria for a good partition and the efficiency are two problems that the image segmentation algorithms need to address.
The main drawback for supervised learning methods is that they usually require a large collection of samples from each object class and the samples must be manually labeled.
SOURCE : Tracking of Multiple Objects under Partial Occlusion - Bing Han, Christopher Paulson, Taoran Lu, Dapeng Wu, Jian Li - 2010
Saturday, September 25, 2010
SIFT tracking set1

Video: Result of identification for tracking
the objective is to find an object in the foreground place a rectangle around the object and find SIFT keypoints in that rectangle, for the next frames only match those keypoints from the rectangle to the image
images and details from (based on my understanding):
Lowe, David G. “Distinctive Image Features from Scale Invariant Keypoints”. International Journal of Computer Vision, 60, 2 (2004)
The STEPS:
- go through all the video and find SIFT keypoints in each frame
- from an initial frame, select a moving object or foreground and place a rectangle around it
- get all the SIFT keypoints in that rectangle
- match the points from that rectangle to all the other points found in step 1
- if match is found place a rectangle in succeeding frames
problem: in some frames keypoints dont match,thats the reason why i loose track of the vehicle
its either there arent enough matches or those keypoints are different from the first frame
again i consider the keypoints found only in the first frame and compare to new frames
TO DO: compare points from first frame to the next.if object found get the new SIFT points of that object from the new frame and then compare to succeeding frame.
objective: track using SIFT points without needed to preselect the cars
code:
img = imread([imgDir '\' fileNames(3).name]);
[r c bands] = size(img);
h=figure;
imshow(img);
hold on;
....
title('Click the top left corner of an object to track...');
[x1 y1] = ginput(1);
plot(x1, y1, 'rx');
title(sprintf('Click the bottom right corner (Right click indicates last object)'));
[x2 y2 button] = ginput(1);
objectCount = objectCount+1;
rectangle('Position', [x1 y1 x2-x1 y2-y1], 'LineWidth', 4, 'EdgeColor', colors(mod(objectCount, size(colors,1))+1, :));
.....
% Find the sift features for the object
imwrite(trackingObjects{objectCount}.img, 'tmp.pgm', 'pgm');
[jnk des locs] = sift('tmp.pgm');
trackingObjects{objectCount}.des = des;
....
% Read in the next image
img = imread([imgDir '\' fileNames(ii).name]);
% Show the image
figure(h)
cla;
imshow(img); hold on;
% Look for features in the image for each object we are tracking
.....
% Match the features for this object
clear match;
match = matchFeatures(trackingObjects{jj}.des, des);
clear newLocs
newLocs = locs(match(match>0), :);
% Only proceed if we found at least one match
if ~isempty(newLocs)
print('match ound');
....
Tuesday, September 21, 2010
SIFT by lowe using ImageJ (PARTIAL)
create a a plain text file and place the code in it.
from within ImageJ, open any image
From the ImageJ menu select PLUGINS -> MACRO's -> RUN
results show the first 2 steps of SIFT, however the 3 step takes alot of time to process because we are going through each pixel and thats done for all 4 octaves.
for short overview of SIFT please see my post HERE
from within ImageJ, open any image
From the ImageJ menu select PLUGINS -> MACRO's -> RUN
results show the first 2 steps of SIFT, however the 3 step takes alot of time to process because we are going through each pixel and thats done for all 4 octaves.
for short overview of SIFT please see my post HERE
//*************************************************
// SIFT Step 1: Constructing a scale space
//*************************************************
//Lowe claims blur the image with a sigma of 0.5 and double it's dimensions
width=getWidth(); height=getHeight();
//------------------------------------------------------------------------
// convert to 8-bit gray scale and create scale space for the first octave
//------------------------------------------------------------------------
run("Duplicate...", "title=[Copy of original]");
Oid = getImageID;
run("8-bit");
run("Duplicate...", "title=[Octave 1 blur1]");
P1id1 = getImageID;
run("Gaussian Blur...", "slice radius=2"); //blur 1
run("Duplicate...", "title=[Octave 1 blur 2]");
P1id2 = getImageID;
run("Gaussian Blur...", "slice radius=4"); //blur 2
run("Duplicate...", "title=[Octave 1 blur 3]");
P1id3 = getImageID;
run("Gaussian Blur...", "slice radius=8"); //blur 3
run("Duplicate...", "title=[Octave 1 blur 4]");
P1id4 = getImageID;
run("Gaussian Blur...", "slice radius=16"); //blur 4
run("Duplicate...", "title=[Octave 1 blur 5]");
P1id5 = getImageID;
run("Gaussian Blur...", "slice radius=16"); //blur 5
showMessage("DONE", "First OCTAVE");
//----------------------------------------------------------------------------
// Perform image resize on original and create second octave
//----------------------------------------------------------------------------
selectImage(Oid);
run("Size...", "width="+width/2+" height="+ height/2);
run("Duplicate...", "title=[Octave 2 blur1]"); P2id1 = getImageID; run("Gaussian Blur...", "slice radius=2"); //blur 1
run("Duplicate...", "title=[Octave 2 blur 2]"); P2id2 = getImageID; run("Gaussian Blur...", "slice radius=4"); //blur 2
run("Duplicate...", "title=[Octave 2 blur 3]"); P2id3 = getImageID; run("Gaussian Blur...", "slice radius=8"); //blur 3
run("Duplicate...", "title=[Octave 2 blur 4]"); P2id4 = getImageID; run("Gaussian Blur...", "slice radius=16"); //blur 4
run("Duplicate...", "title=[Octave 2 blur 5]"); P2id5 = getImageID; run("Gaussian Blur...", "slice radius=16"); //blur 5
showMessage("DONE", "Second OCTAVE");
//----------------------------------------------------------------------------
// Perform image resize on original and create Third octave
//----------------------------------------------------------------------------
selectImage(Oid);
run("Size...", "width="+width/4+" height="+ height/4);
run("Duplicate...", "title=[Octave 3 blur1]"); P3id1 = getImageID; run("Gaussian Blur...", "slice radius=2"); //blur 1
run("Duplicate...", "title=[Octave 3 blur 2]"); P3id2 = getImageID; run("Gaussian Blur...", "slice radius=4"); //blur 2
run("Duplicate...", "title=[Octave 3 blur 3]"); P3id3 = getImageID; run("Gaussian Blur...", "slice radius=8"); //blur 3
run("Duplicate...", "title=[Octave 3 blur 4]"); P3id4 = getImageID; run("Gaussian Blur...", "slice radius=16"); //blur 4
run("Duplicate...", "title=[Octave 3 blur 5]"); P3id5 = getImageID; run("Gaussian Blur...", "slice radius=16"); //blur 5
showMessage("DONE", "Third OCTAVE");
//------------------------------------------------------------------------------
// Perform image resize on original and create Forth octave
//------------------------------------------------------------------------------
selectImage(Oid);
run("Size...", "width="+width/8+" height="+ height/8);
run("Duplicate...", "title=[Octave 4 blur1]"); P4id1 = getImageID; run("Gaussian Blur...", "slice radius=2"); //blur 1
run("Duplicate...", "title=[Octave 4 blur 2]"); P4id2 = getImageID; run("Gaussian Blur...", "slice radius=4"); //blur 2
run("Duplicate...", "title=[Octave 4 blur 3]"); P4id3 = getImageID; run("Gaussian Blur...", "slice radius=8"); //blur 3
run("Duplicate...", "title=[Octave 4 blur 4]"); P4id4 = getImageID; run("Gaussian Blur...", "slice radius=16"); //blur 4
run("Duplicate...", "title=[Octave 4 blur 5]"); P4id5 = getImageID; run("Gaussian Blur...", "slice radius=16"); //blur 5
showMessage("DONE", "Forth OCTAVE");
//**********************************************************
// SIFT Step 2: Laplacian of Gaussian Approximation
//**********************************************************
// input is 5 blurred images per octave
// output is 4 images per octave
imageCalculator('subtract', P1id1, P1id2); Q1I1 = getImageID; rename("Result Subtract Octave 1");
imageCalculator('subtract', P1id2, P1id3); Q1I2 = getImageID; rename("Result Subtract Octave 1");
imageCalculator('subtract', P1id3, P1id4); Q1I3 = getImageID; rename("Result Subtract Octave 1");
imageCalculator('subtract', P1id4, P1id5); Q1I4 = getImageID; rename("Result Subtract Octave 1");
imageCalculator('subtract', P2id1, P2id2); Q2I1 = getImageID; rename("Result Subtract Octave 2");
imageCalculator('subtract', P2id2, P2id3); Q2I2 = getImageID; rename("Result Subtract Octave 2");
imageCalculator('subtract', P2id3, P2id4); Q2I3 = getImageID; rename("Result Subtract Octave 2");
imageCalculator('subtract', P2id4, P2id5); Q2I4 = getImageID; rename("Result Subtract Octave 2");
imageCalculator('subtract', P3id1, P3id2); Q3I1 = getImageID; rename("Result Subtract Octave 3");
imageCalculator('subtract', P3id2, P3id3); Q3I2 = getImageID; rename("Result Subtract Octave 3");
imageCalculator('subtract', P3id3, P3id4); Q3I3 = getImageID; rename("Result Subtract Octave 3");
imageCalculator('subtract', P3id4, P3id5); Q3I4 = getImageID; rename("Result Subtract Octave 3");
imageCalculator('subtract', P3id1, P3id2); Q4I1 = getImageID; rename("Result Subtract Octave 4");
imageCalculator('subtract', P3id2, P3id3); Q4I2 = getImageID; rename("Result Subtract Octave 4");
imageCalculator('subtract', P3id3, P3id4); Q4I3 = getImageID; rename("Result Subtract Octave 4");
imageCalculator('subtract', P3id4, P3id5); Q4I4 = getImageID; rename("Result Subtract Octave 4");
//************************************************************
// SIFT Step 3: Finding key points
//************************************************************
//need to generate 2 extrema images
// maxima and minima almost never lies exactly on a pixel. since its between pixels we need to locate it mathematically using Tylor expansion
//--------------------------------------------------------------------------------
// first octave
//--------------------------------------------------------------------------------
/*
selectImage(Q1I2);
width=getWidth(); height=getHeight();
num = 0; //number of points
numRemoved = 0; //failed tested points
for (xi=1; xi<width; xi++)
{
for(yi=1; yi<height; yi++)
{
justSet = 1;
currentPixel = getPixel(xi, yi);
if ( (currentPixel > getPixel(yi+1, xi)) &
(currentPixel > getPixel(yi+1, xi) ) &
(currentPixel > getPixel(yi, xi-1) ) &
(currentPixel > getPixel(yi, xi+1)) &
(currentPixel > getPixel(yi-1, xi-1) ) &
(currentPixel > getPixel(yi-1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi-1)) )
{
selectImage(Q1I1);
if ( (currentPixel > getPixel(yi+1, xi)) &
(currentPixel > getPixel(yi+1, xi) ) &
(currentPixel > getPixel(yi, xi-1) ) &
(currentPixel > getPixel(yi, xi+1)) &
(currentPixel > getPixel(yi-1, xi-1) ) &
(currentPixel > getPixel(yi-1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi-1)) )
{
selectImage(Q1I3);
if ( (currentPixel > getPixel(yi+1, xi)) &
(currentPixel > getPixel(yi+1, xi) ) &
(currentPixel > getPixel(yi, xi-1) ) &
(currentPixel > getPixel(yi, xi+1)) &
(currentPixel > getPixel(yi-1, xi-1) ) &
(currentPixel > getPixel(yi-1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi-1)) )
{
num++;
}
}
}
}
}
print("first part= " + num);
selectImage(Q1I3);
width=getWidth(); height=getHeight();
for (xi=1; xi<width; xi++)
{
for(yi=1; yi<height; yi++)
{
justSet = 1;
currentPixel = getPixel(xi, yi);
if ( (currentPixel > getPixel(yi+1, xi)) &
(currentPixel > getPixel(yi+1, xi) ) &
(currentPixel > getPixel(yi, xi-1) ) &
(currentPixel > getPixel(yi, xi+1)) &
(currentPixel > getPixel(yi-1, xi-1) ) &
(currentPixel > getPixel(yi-1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi-1)) )
{
selectImage(Q1I2);
if ( (currentPixel > getPixel(yi+1, xi)) &
(currentPixel > getPixel(yi+1, xi) ) &
(currentPixel > getPixel(yi, xi-1) ) &
(currentPixel > getPixel(yi, xi+1)) &
(currentPixel > getPixel(yi-1, xi-1) ) &
(currentPixel > getPixel(yi-1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi-1)) )
{
selectImage(Q1I4);
if ( (currentPixel > getPixel(yi+1, xi)) &
(currentPixel > getPixel(yi+1, xi) ) &
(currentPixel > getPixel(yi, xi-1) ) &
(currentPixel > getPixel(yi, xi+1)) &
(currentPixel > getPixel(yi-1, xi-1) ) &
(currentPixel > getPixel(yi-1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi+1) ) &
(currentPixel > getPixel(yi+1, xi-1)) )
{
num++;
}
}
}
}
}
print("second part= "+num);
*/
//+++++++++++++++++++++++++++++++++++++++++++
// process takes too long... alternative MY IDEA
//+++++++++++++++++++++++++++++++++++++++++++
Randomly select points and compare it to a threshold if its maximum or minimum to the 26 neighbors then consider that point to be on a blob based on:
T. Lindeberg. Scale-Space Theory in Computer Vision.
Kluwer Academic Publishers, Norwell, MA, USA, 1994.
Quote: "local extrema points are located in a blob region"
So instead of going through each pixel of the image in multiple scales: select a specific number of random points and compare with the 26 neighbors. if you get a specific number of points that are maximum of minimum then continue to the next step if not get another set of random points until your specific number of maximum and minimum points are found.
CODE TO FOLLOW
Friday, September 3, 2010
Angled stereo vision








The distance between the lenses in a typical stereo camera (the intra-axial distance) is about the distance between one's eyes (known as the intra-ocular distance) and is about 6.35cm, though a longer base line (greater inter-camera distance) produces more extreme 3-dimensionality.
However we have 2 cameras which are angled in contrast to the stereo vision camera where both cameras are parallel on a line
However we have 2 cameras which are angled in contrast to the stereo vision camera where both cameras are parallel on a line
Sunday, August 29, 2010
Hessian Matrix
In mathematics, the Hessian matrix (or simply the Hessian) is the square matrix of second-order partial derivatives of a function; that is, it describes the local curvature of a function of many variables. The second derivative can be applied at a non-degenerate critical point x. If the Hessian is positive definite at x, then f attains a local minimum at x. If the Hessian is negative definite at x, then f attains a local maximum at x. If the Hessian has both positive and negative eigenvalues then x is a saddle point for f (this is true even if x is degenerate). Otherwise the test is inconclusive. In view of what has just been said, the second derivative test for functions of one and two variables is simple. In one variable, the Hessian contains just one second derivative; if it is positive then x is a local minimum, if it is negative then x is a local maximum; if it is zero then the test is inconclusive. In two variables, the discriminant can be used, because the determinant is the product of the eigenvalues. If it is positive then the eigenvalues are both positive, or both negative. If it is negative then the two eigenvalues have different signs. If it is zero, then the second derivative test is inconclusive(wikipdia).
consider a continuous function of two variables such that the value of the function at (x,y) is given by f(x,y). The Hessian matrix, H, is the matrix of partial derivates of the function f.

The determinant of this matrix, known as the discriminant, is calculated by:

The value of the discriminant is used to classify the maxima and minima of the function by the second order derivative test. Since the determinant is the product of eigenvalues of the Hessian we can classify the points based on the sign of the result. If the determinant is negative then the eigenvalues have different signs and hence the point is not a local extremum; if it is positive then either both eigenvalues are positive or both are negative and in either case the point is classified as an extremum.
NOTE:
We can calculate the derivatives by convolution with an appropriate kernel. In the case of SURF the second order scale normalised Gaussian is the chosen filter as it allows for analysis over scales as well as space. We can construct kernels for the Gaussian derivatives in x, y and combined xy direction such that we calculate the four entries of the Hessian matrix. Use of the Gaussian allows us to vary the amount of smoothing during the convolution stage so that the determinant is calculated at different scales. Furthermore, since the Gaussian is an isotropic (i.e. circularly symmetric) function, convolution with the kernel allows for rotation invariance.
Lowe found performance increase in approximating the Laplacian of Gaussians by a difference of Gaussians. In a similiar manner, Bay proposed an approximation to the Laplacian of Gaussians by using box filter representations of the respective kernels.
consider a continuous function of two variables such that the value of the function at (x,y) is given by f(x,y). The Hessian matrix, H, is the matrix of partial derivates of the function f.

The determinant of this matrix, known as the discriminant, is calculated by:

The value of the discriminant is used to classify the maxima and minima of the function by the second order derivative test. Since the determinant is the product of eigenvalues of the Hessian we can classify the points based on the sign of the result. If the determinant is negative then the eigenvalues have different signs and hence the point is not a local extremum; if it is positive then either both eigenvalues are positive or both are negative and in either case the point is classified as an extremum.
NOTE:
We can calculate the derivatives by convolution with an appropriate kernel. In the case of SURF the second order scale normalised Gaussian is the chosen filter as it allows for analysis over scales as well as space. We can construct kernels for the Gaussian derivatives in x, y and combined xy direction such that we calculate the four entries of the Hessian matrix. Use of the Gaussian allows us to vary the amount of smoothing during the convolution stage so that the determinant is calculated at different scales. Furthermore, since the Gaussian is an isotropic (i.e. circularly symmetric) function, convolution with the kernel allows for rotation invariance.
Lowe found performance increase in approximating the Laplacian of Gaussians by a difference of Gaussians. In a similiar manner, Bay proposed an approximation to the Laplacian of Gaussians by using box filter representations of the respective kernels.
Histogram
A histogram is one of the basic quality tools. It is used to graphically summarize and display the distribution and variation of a process data set. A frequency distribution shows how often each different value in a set of data occurs. The main purpose of a histogram is to clarify the presentation of data.
• • •
What is the most common system response?
What distribution (center, variation and shape) does the data have?
Does the data look symmetric or is it skewed to the left or right?
Typical applications of histograms in root cause analysis include:
• Presenting data to determine which causes dominate
• Understanding the distribution of occurrences of different problems, causes,consequences, etc.
Weaknesses
There are two weaknesses of histograms that you should bear in mind. The first is that histograms can be manipulated to show different pictures. If too few or too many bars are used, the histogram can be misleading. This is an area which requires some judgment, and perhaps some experimentation, based on the analyst's experience.
Histograms can also obscure the time differences among data sets.
furthermore there is a loss of individual measurements due to grouping. Misrepresentation of data from groups that are too wide or too narrow.
Distributions to encounter:
 Bi-Modal (double-peaked)
Bi-Modal (double-peaked)
Distribution appears to have two peaks
• May indicate that data from more than one process are mixed together
o Materials may have come from two separate vendors
o Samples may have come from two separate machines
• A bi-modal curve often means that the data actually reflects two distinct processes with different centers. You will need to distinguish between the two processes to get a clear view of what is really happening in either individual process.
• • •
What is the most common system response?
What distribution (center, variation and shape) does the data have?
Does the data look symmetric or is it skewed to the left or right?
Typical applications of histograms in root cause analysis include:
• Presenting data to determine which causes dominate
• Understanding the distribution of occurrences of different problems, causes,consequences, etc.
Weaknesses
There are two weaknesses of histograms that you should bear in mind. The first is that histograms can be manipulated to show different pictures. If too few or too many bars are used, the histogram can be misleading. This is an area which requires some judgment, and perhaps some experimentation, based on the analyst's experience.
Histograms can also obscure the time differences among data sets.
furthermore there is a loss of individual measurements due to grouping. Misrepresentation of data from groups that are too wide or too narrow.
Distributions to encounter:
 Bi-Modal (double-peaked)
Bi-Modal (double-peaked)Distribution appears to have two peaks
• May indicate that data from more than one process are mixed together
o Materials may have come from two separate vendors
o Samples may have come from two separate machines
• A bi-modal curve often means that the data actually reflects two distinct processes with different centers. You will need to distinguish between the two processes to get a clear view of what is really happening in either individual process.
SURF Details (Speed Up Robust Features)
SURF (Speeded Up Robust Features) is a robust image detector & descriptor, first presented by Herbert Bay et al. in 2006, that can be used in computer vision tasks like object recognition or 3D reconstruction. It is partly inspired by the SIFT descriptor. The standard version of SURF is several times faster than SIFT and claimed by its authors to be more robust against different image transformations than SIFT. SURF is based on sums of approximated 2D Haar wavelet responses and makes an efficient use of integral images. As basic image features it uses a Haar wavelet approximation of the determinant of Hessian blob detector (WIKIPEDIA).
The performance gain in the SURF Implementation is due to use of integral images (See my post on Integral Images)
In constructing the scale space, Lowe proposed a difference of Gaussian to approximate the Laplacian of Gaussian.The images were blurred and subsampled to produce a scale space. After which the difference of gaussian was used to estimate the laplacian gaussian.
in SURF this was done using a box filter representation of a kernel. This kernel was used to produce the pyramid and kept the original image unchanged while changing the filter size.
TO DO: Add more of the details
The performance gain in the SURF Implementation is due to use of integral images (See my post on Integral Images)
In constructing the scale space, Lowe proposed a difference of Gaussian to approximate the Laplacian of Gaussian.The images were blurred and subsampled to produce a scale space. After which the difference of gaussian was used to estimate the laplacian gaussian.
in SURF this was done using a box filter representation of a kernel. This kernel was used to produce the pyramid and kept the original image unchanged while changing the filter size.
TO DO: Add more of the details
PCA-SIFT Details
PCA-SIFT was introduced as an improvement for SIFT. The implementation only differs in the 4th step (keypoint descriptor). PCA-SIFT uses Principal Component Analysis (PCA) instead of a histogram to normalize the gradient patch. Hence, the feature vector is significantly smaller than the standard SIFT feature vector.
It differs from the original SIFT implementation in its forth stage. By reducing the 128 element of the original SIFT using PCA, results in a significant space benefit.
Another difference is the input vector is created by concatenating the horizontal and vertical gradient maps for 41x41 patch centered at the keypoint. Producing 2x39x39 = 3042 vector elements. The fewer components of PCA-SIFT requires less storage therefore, resulting in faster matching. The dimensionality of this feature space is arbitrary chosen as n=20, which results in a significant space benefit.
TO DO: add more detail
It differs from the original SIFT implementation in its forth stage. By reducing the 128 element of the original SIFT using PCA, results in a significant space benefit.
Another difference is the input vector is created by concatenating the horizontal and vertical gradient maps for 41x41 patch centered at the keypoint. Producing 2x39x39 = 3042 vector elements. The fewer components of PCA-SIFT requires less storage therefore, resulting in faster matching. The dimensionality of this feature space is arbitrary chosen as n=20, which results in a significant space benefit.
TO DO: add more detail
The Log-Polar Transform
The log-polar transform is a simple operation that changes the coordinate system of an image from Cartesian to log-polar.
 Before and after conversion to logpolar coordinate system
Before and after conversion to logpolar coordinate system
Log-polar coordinates have several interesting properties::..
First, when optical flow is computed as the camera moves along the optical axis (as is common in robotics), the optical flow vectors are radial from the image center. However, in log-polar coordinates, the flow vectors are vertical. This can make the detection of moving objects more efficient computationally.
Second, the log polar transform converts an image to a form that is rotation and scale invariant. This can be very helpful for object detection. Finally, the log-polar transform emulates how images appear on the back of the human retina. (The brain then transforms the image to the Cartesian-like way we perceive it.)
In Matlab (http://www.mathworks.com/matlabcentral/newsreader/view_thread/108599):
function [pim,zoff] = PolarTransform(img,zcenter,rs,thetas)
% function [pim,zoff] = PolarTransform(img,zcenter,rs,thetas)
% extract the polar transform of a section of img
% polar transform origin at zcenter(x+iy)
% rs(pixels),thetas(radians) are sets of radii and angles to sample
% if they are scalars, then the radii are 1:r
% and thetas is taken to be dtheta in
% thetas = linspace(0, 2*pi , round(2*pi/dtheta) ); thetas =
thetas(1:end-1)
% zoff are the coordinates of the sample points in the original image
(x+iy)
% REA 4/15-6/1/05
if isscalar(rs)
rs = 1:round(rs);
end
if isscalar(thetas)
thetas = linspace(0, 2*pi , round(2*pi/thetas) );
thetas = thetas(1: (end-1) );
end
[thetas_img,rs_img] = meshgrid(thetas,rs);
[xs,ys] = pol2cart(thetas_img,rs_img);
% offset the x,y coords to the appropriate location
zoff = complex(xs,ys) + zcenter;
% and extract the image data
pim = interp2(img,real(zoff),imag(zoff),'nearest');
Furthermore:
Log-polar coordinates have several interesting properties::..
First, when optical flow is computed as the camera moves along the optical axis (as is common in robotics), the optical flow vectors are radial from the image center. However, in log-polar coordinates, the flow vectors are vertical. This can make the detection of moving objects more efficient computationally.
Second, the log polar transform converts an image to a form that is rotation and scale invariant. This can be very helpful for object detection. Finally, the log-polar transform emulates how images appear on the back of the human retina. (The brain then transforms the image to the Cartesian-like way we perceive it.)
In Matlab (http://www.mathworks.com/matlabcentral/newsreader/view_thread/108599):
function [pim,zoff] = PolarTransform(img,zcenter,rs,thetas)
% function [pim,zoff] = PolarTransform(img,zcenter,rs,thetas)
% extract the polar transform of a section of img
% polar transform origin at zcenter(x+iy)
% rs(pixels),thetas(radians) are sets of radii and angles to sample
% if they are scalars, then the radii are 1:r
% and thetas is taken to be dtheta in
% thetas = linspace(0, 2*pi , round(2*pi/dtheta) ); thetas =
thetas(1:end-1)
% zoff are the coordinates of the sample points in the original image
(x+iy)
% REA 4/15-6/1/05
if isscalar(rs)
rs = 1:round(rs);
end
if isscalar(thetas)
thetas = linspace(0, 2*pi , round(2*pi/thetas) );
thetas = thetas(1: (end-1) );
end
[thetas_img,rs_img] = meshgrid(thetas,rs);
[xs,ys] = pol2cart(thetas_img,rs_img);
% offset the x,y coords to the appropriate location
zoff = complex(xs,ys) + zcenter;
% and extract the image data
pim = interp2(img,real(zoff),imag(zoff),'nearest');
Furthermore:
Cartesian Coordinate System Conversion
| cart2pol | Transform Cartesian coordinates to polar or cylindrical |
| cart2sph | Transform Cartesian coordinates to spherical |
| pol2cart | Transform polar or cylindrical coordinates to Cartesian |
| sph2cart | Transform spherical coordinates to Cartesian |
Notes: SURF Haar like feature (Copy paste from source)
In matching keypoints, using euclidean distance:
A correct-positive is a match where the two keypoints correspond to the same physical location (as determined either by ground truth for labeled images, or using known image transformations for synthetic image de-formation tests). A false-positive is a match where the two keypoints come from different physical locations.
The Haar wavelet is also the simplest possible wavelet. The technical disadvantage of the Haar wavelet is that it is not continuous, and therefore not differentiable. This property can, however, be an advantage for the analysis of signals with sudden transitions, such as monitoring of tool failure in machines
A Haar-like feature considers adjacent rectangular regions at a specific location in a detection window, sums up the pixel intensities in these regions and calculates the difference between them. This difference is then used to categorize subsections of an image. For example, let us say we have an image database with human faces. It is a common observation that among all faces the region of the eyes is darker than the region of the cheeks. Therefore a common haar feature for face detection is a set of two adjacent rectangles that lie above the eye and the cheek region. The position of these rectangles is defined relative to a detection window that acts like a bounding box to the target object (the face in this case).
a window of the target size is moved over the input image, and for each subsection of the image the Haar-like feature is calculated. This difference is then compared to a learned threshold that separates non-objects from objects. Because such a Haar-like feature is only a weak learner or classifier (its detection quality is slightly better than random guessing) a large number of Haar-like features is necessary to describe an object with sufficient accuracy. In the Viola-Jones object detection framework, the Haar-like features are therefore organized in something called a classifier cascade to form a strong learner or classifier.
The key advantage of a Haar-like feature over most other features is its calculation speed. Due to the use of integral images, a Haar-like feature of any size can be calculated in constant time (approximately 60 microprocessor instructions for a 2-rectangle feature).
A correct-positive is a match where the two keypoints correspond to the same physical location (as determined either by ground truth for labeled images, or using known image transformations for synthetic image de-formation tests). A false-positive is a match where the two keypoints come from different physical locations.
The Haar wavelet is also the simplest possible wavelet. The technical disadvantage of the Haar wavelet is that it is not continuous, and therefore not differentiable. This property can, however, be an advantage for the analysis of signals with sudden transitions, such as monitoring of tool failure in machines
A Haar-like feature considers adjacent rectangular regions at a specific location in a detection window, sums up the pixel intensities in these regions and calculates the difference between them. This difference is then used to categorize subsections of an image. For example, let us say we have an image database with human faces. It is a common observation that among all faces the region of the eyes is darker than the region of the cheeks. Therefore a common haar feature for face detection is a set of two adjacent rectangles that lie above the eye and the cheek region. The position of these rectangles is defined relative to a detection window that acts like a bounding box to the target object (the face in this case).
a window of the target size is moved over the input image, and for each subsection of the image the Haar-like feature is calculated. This difference is then compared to a learned threshold that separates non-objects from objects. Because such a Haar-like feature is only a weak learner or classifier (its detection quality is slightly better than random guessing) a large number of Haar-like features is necessary to describe an object with sufficient accuracy. In the Viola-Jones object detection framework, the Haar-like features are therefore organized in something called a classifier cascade to form a strong learner or classifier.
The key advantage of a Haar-like feature over most other features is its calculation speed. Due to the use of integral images, a Haar-like feature of any size can be calculated in constant time (approximately 60 microprocessor instructions for a 2-rectangle feature).
Pyramids
It is a type of multi-scale signal representation developed by the computer vision, image processing and signal processing communities, in which a signal or an image is subject to repeated smoothing and subsampling. Historically, pyramid representation is a predecessor to scale space representation and multiresolution analysis (WIKIPEDIA).
There are 2 types of pyramids: the lowpass and bandpass.
SIFT uses LOWPASS pyramids: A lowpass pyramid is generated by first smoothing the image with an appropriate smoothing filter and then subsampling the smoothed image, usually by a factor of two along each coordinate direction.

A bandpass pyramid is obtained by forming the difference between adjacent levels in a pyramid, where in addition some kind of interpolation is performed between representations at adjacent levels of resolution, to enable the computation of pixelwise differences.
Disadvantage:
Pyramid representation leads to rapidly decreasing image size. This reduces computational work in computation of the representation and subsequent processing. The main disadvantage of with pyramids is that they are defined from a logarithmic process, making theoritical analysis complicated. Furthermore, they correspond to quite a coarse quantization along the scale direction, which makes logarithmically hard to relate images structures across multiple scales. ...
A scale-space is a continuous function which can be used to find extrema across all possible scales [A. Witkin. Scale-space filtering, int. joint conf. Artif. Intell, 2:1019–1021, 1983.].
In computer vision the scale-space is typically implemented as an image pyramid where the input image is iteratively convolved with Gaussian kernel and repeatedly sub-sampled (reduced in size). This method is used to great effect in SIFT (See my post of SIFT Details) but since each layer relies on the previous, and images need to be resized it is not computationally efficient.
Another way to construct the scale-space is by applying kernels of increasing size to the original image. This allows for multiple layers of the scale-space pyramid to be processed simultaneously and negates the need to subsample the image hence providing performance increase.
The SURF approach leaves the original image unchanged and varies only the filter size.
References:
H. Bay, T. Tuytelaars, and L. Van Gool. Surf: Speeded up robust features. European Conference on Computer Vision, 1:404–417, 2006.
D.G. Lowe. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 60(2):91–110, 2004.
There are 2 types of pyramids: the lowpass and bandpass.
SIFT uses LOWPASS pyramids: A lowpass pyramid is generated by first smoothing the image with an appropriate smoothing filter and then subsampling the smoothed image, usually by a factor of two along each coordinate direction.

A bandpass pyramid is obtained by forming the difference between adjacent levels in a pyramid, where in addition some kind of interpolation is performed between representations at adjacent levels of resolution, to enable the computation of pixelwise differences.
Disadvantage:
Pyramid representation leads to rapidly decreasing image size. This reduces computational work in computation of the representation and subsequent processing. The main disadvantage of with pyramids is that they are defined from a logarithmic process, making theoritical analysis complicated. Furthermore, they correspond to quite a coarse quantization along the scale direction, which makes logarithmically hard to relate images structures across multiple scales. ...
A scale-space is a continuous function which can be used to find extrema across all possible scales [A. Witkin. Scale-space filtering, int. joint conf. Artif. Intell, 2:1019–1021, 1983.].
In computer vision the scale-space is typically implemented as an image pyramid where the input image is iteratively convolved with Gaussian kernel and repeatedly sub-sampled (reduced in size). This method is used to great effect in SIFT (See my post of SIFT Details) but since each layer relies on the previous, and images need to be resized it is not computationally efficient.
Another way to construct the scale-space is by applying kernels of increasing size to the original image. This allows for multiple layers of the scale-space pyramid to be processed simultaneously and negates the need to subsample the image hence providing performance increase.
The SURF approach leaves the original image unchanged and varies only the filter size.
References:
H. Bay, T. Tuytelaars, and L. Van Gool. Surf: Speeded up robust features. European Conference on Computer Vision, 1:404–417, 2006.
D.G. Lowe. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 60(2):91–110, 2004.
Saturday, August 28, 2010
computing integral images (summed area table)
A summed area table (also known as an integral image) is an algorithm for quickly and efficiently generating the sum of values in a rectangular subset of a grid.
The idea behind summed area tables is that you build a two dimensional running sum of the image.
its widely used in the computer vision community when it was used by Viola-Jones object detection framework twenty years after its introduction.
Viola, Paul; Jones, Michael (2002). "Robust Real-time Object Detection". International Journal of Computer Vision. http://research.microsoft.com/~viola/Pubs/Detect/violaJones_IJCV.pdf.
Integral Images is done for GRAY SCALE Image.
In MATLAB, integral images is computed via the following function:
This function computes an integral image
such that the value of intim(r,c)
equals sum(sum(im(1:r, 1:c))
intim = cumsum(cumsum(im,1),2);A summed area table, or integral
image, can be generated by computing the cumulative sums along the rows of an image and then computing the cumulative sums down the columns. Thus the value at any point (x, y) in the integral image is the sum of all the image pixels above and to the left of (x, y), inclusive.
The integral image is computed rapidly from an input image and is used to speed up the calculation of any upright rectangular area. Used in the SURF implementation
[rows, cols] = size(intim);
fim = zeros(rows, cols);
[nfilters, fcols] = size(f);
if fcols ~= 5
error('Filters must be specified via an nx5 matrix');
end
f(:,1:2) = f(:,1:2)-1; % Adjust the values of r1 and c1 to save addition
% operations inside the loops below
rmin = 1-min(f(:,1)); % Set loop bounds so that we do not try to
rmax = rows - max(f(:,3)); % access values outside the image.
cmin = 1-min(f(:,2));
cmax = cols - max(f(:,4));
for r = rmin:rmax
for c = cmin:cmax
for n = 1:nfilters
fim(r,c) = fim(r,c) + f(n,5)*...
(intim(r+f(n,3),c+f(n,4)) - intim(r+f(n,1),c+f(n,4)) ...
- intim(r+f(n,3),c+f(n,2)) + intim(r+f(n,1),c+f(n,2)));
end
end
end
examples images to follow:
 Original Image
Original Image
Filtered image with box filter and integral image
 an nxm image produces an nxm integral image
an nxm image produces an nxm integral image
Thursday, August 26, 2010
Principal Component Analysis
Principal component analysis has several disadvantages including
The first principal component accounts for as much of the variability in the data as possible, and each succeeding component accounts for as much of the remaining variability as possible. Although PCA is used as a tool in exploratory data analysis and making predictive models, its strength is also considered its weakness. This is because of its non-parametric analysis. Since there are no parameters to tweak, the answer of PCA is unique and independent of the users experience. Thus, the answer may not be optimal in all cases.
The basic idea of PCA is given a set of variables, find a set of variables with less redundancy, this gives a good representation for regression analysis. Since redundancy is computed via correlation, it is required for reducing the scale space between vector elements
In Matlab PCA is done via the following function:
[COEFF, SCORE] = princomp(X);
EXAMPLES TO FOLLOW:
TO DO
- Translation variant
- Scale variant
- Background variant
- Lighting variant
The first principal component accounts for as much of the variability in the data as possible, and each succeeding component accounts for as much of the remaining variability as possible. Although PCA is used as a tool in exploratory data analysis and making predictive models, its strength is also considered its weakness. This is because of its non-parametric analysis. Since there are no parameters to tweak, the answer of PCA is unique and independent of the users experience. Thus, the answer may not be optimal in all cases.
The basic idea of PCA is given a set of variables, find a set of variables with less redundancy, this gives a good representation for regression analysis. Since redundancy is computed via correlation, it is required for reducing the scale space between vector elements
In Matlab PCA is done via the following function:
[COEFF, SCORE] = princomp(X);
EXAMPLES TO FOLLOW:
TO DO
Sunday, July 18, 2010
Details behind SIFT Feature detection

First octave blur progressively

second octave: resize to half the image and blur progressively


Getting LoG. Subtract image 1 from image 2. Then subtract image 2 from image 3. then subtract image 3 from image 4
 Find the maxima/minima of images from one scale higher and lower.
Find the maxima/minima of images from one scale higher and lower.NOW FOR THE DETAILS:(based on my understanding)
images and details from :
Lowe, David G. “Distinctive Image Features from Scale Invariant Keypoints”. International Journal of Computer Vision, 60, 2 (2004)
Scale invariant feature transform is used for detection and extracting local features of an image.
the steps are as follows:
- Generate a Difference of Gaussian(DoG) or a laplacian pyramid
- Extrema detection from the DoG pyramid which is the local maxima and minima, the point found is an extrema
- Eliminate low contrast or poorly localized points, what remains are the keypoints
- Assign an orientation to the points based on the image properties
- Compute and generate keypoint descriptors
The main SIFT implementation consists of 4 major stages described by Lowe . The first step is finding a scale space extrema. This is done via image pyramids. The process involves repeatedly smoothing an image by convolving it with a gaussian operator and subsequently sub-sampling in order to achieve higher levels of the pyramid. For this stage, Lowe suggests 4 octaves and 5 levels of blur. An octave corresponds to doubling the value of σ.


After obtaining a full pyramid, the difference of each octave results in an approximate solution to the Laplacian of Gaussian.

The amount of blur per interval and octave is very important in obtaining keypoints (matlab source screenshot)

this is a manual computation i did in excel

The next step is to iterate through each pixel and compare it with its 8 surounding neighbors and 9 neighbors at one scale higher and lower. If the pixel value is higher or lower amongst its neighbors then it is considered as a keypoint.
After determining the keypoint, tylor expansion is used to generate subpixel values from the pixel data.

Doing so, will generate a lot of keypoints. These keypoints are low contrast points or points along an edge. To eliminate these points, tylor expansion is used to get an intensity value for each subpixel. It is then compared against a threshold. If the value is higher or lower than the threshold, the point is accepted or rejected. Following this step a series of stable keypoints will be left that are scale invariant. To make the keypoints rotation invariant, a weighted histogram of local gradient direction and magnitudes around each keypoint is computed at a selected scale and the most prominent orientation in that region is selected and assigned to the keypoint.

The orientation of these keypoints are broken into 36 bins, each representing 10 degrees from the 360 degree. After creating the histogram any peaks above 80 are converted to another keypoint with a different orientation.
To do this, check the highest peek in the histogram and get the left and right neighbors. you will get 3 points, fit a downward parabola and solve the 3 equations to get a new keypoint. do this for all octaves and all iterations.

The next step is to produce unique ID’s for each keypoint that will differentiate them from each other. To accomplish this, a 16x16 window is created between pixels around the keypoint. It is then split into sixteen 4x4 windows and an 8 bin histogram is generated. The histogram and gradient values are interpolated to produce a 128 dimensional feature vector which is invariant to affine illumination. To obtain illumination invariance, the descriptor is normalized by the square root of the sum of squared components

The keypoints are now invariant to affine transformation and partial illumination changes.
Although SIFT has been used in the computer vision community for quite some time there are several studies that try to improve on it.
Subscribe to:
Posts (Atom)