
 for my second experiment i tried translation invariance, 2 images taken from different angles. i got 243 matches
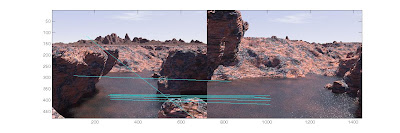
for my second experiment i tried translation invariance, 2 images taken from different angles. i got 243 matches In my next experiment i tried a complete affine transformation of a graffiti wall, i got 22 matches but not so accurate. this shows the keypoints have a problem in its rotation and scaling invariants. my magnitude and teta maybe the cause of this.
In my next experiment i tried a complete affine transformation of a graffiti wall, i got 22 matches but not so accurate. this shows the keypoints have a problem in its rotation and scaling invariants. my magnitude and teta maybe the cause of this. This is a matching from David Lowes algorithm showing a clear affine invariance.
This is a matching from David Lowes algorithm showing a clear affine invariance.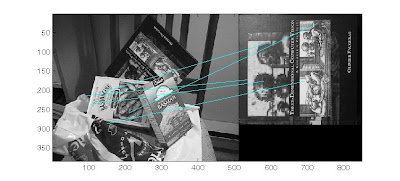
my implementation gives me a very bad matching. alot more work to do.
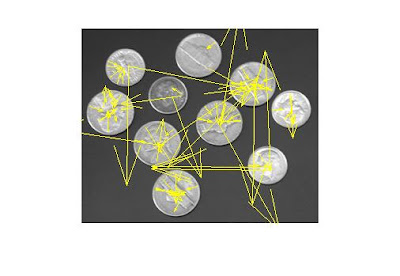
and more bad results, if the orientation of the keypoint is wrong, the matching will also suffer so i tired different tangents in matlab
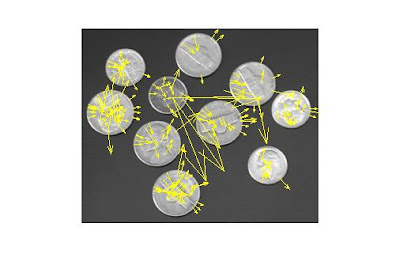
atan(dy/dx);
 atan2(dy,dx);
atan2(dy,dx);BOTH IMAGES: show clearly that rotation invariance is not achieved, this is the reason why the matching gives alot of false negative results
furthermore; the amount of BLUR is also very important
 images and details from (based on my understanding):
images and details from (based on my understanding):Lowe, David G. “Distinctive Image Features from Scale Invariant Keypoints”. International Journal of Computer Vision, 60, 2 (2004)







{kind=link}
{kind=link}